【實體遠距同步】ROS機器人系統開發實戰 | 免費諮詢課程
開始報名日期: 2025年5月10日 02:00
截止日期: 2025年5月10日 13:00
課程簡介
你可以自己從頭到尾設計出一個嵌入式/機器人軟硬體系統,而各種感測器及致動器(actuator)的驅動都必須由你自己撰寫。在軟體底層上,基於你的目的,你可能需要設計同步控制的架構,甚至要做分散式系統,可以進行遠端呼叫或是程序間進行一對多或多對多的訊息傳遞。
然而,現在的智能系統愈來愈複雜,影像處理、物件識別、機器學習、馬達驅動、導航、模擬等功能都必須整合在系統中。而由於各種技術存在不同的標準,因此「整合」對於開發者而言,非常耗時費力。ROS的出現,其高度整合的特性,幫助開發者大大提升開發的效率。ROS是一個開源的機器人系統開發平台,具有豐富資源,這些都是來自於全世界研究人員長期研發的成果。因此,一旦基於ROS你就可以整合全世界的研究能量,只要引用相關的應用套件(Package),不必再自己重造輪子(Reinvent the wheel),而能把時間花在鑽研自己的演算法和產品上最能創造價值的地方。
以硬體實力見長的台灣廠商,若能開發出符合ROS標準的產品,在市場上會更具競爭力。再加上人工智慧是台灣政府發展的重點方向,其中一個領域就是機器人開發。很快地,台灣產業對於ROS人才會有爆發性的需求,因此,盡早培養ROS職能,會讓你變得更炙手可熱。
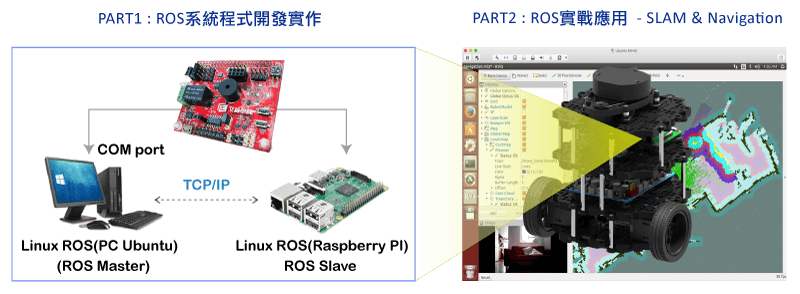
為了幫助你更有效率地學會ROS機器人系統開發的核心技術,本課程由具有豐富機器人開發經驗的業界工程師親授,強調實務教學,深入淺出引領你了解ROS重要觀念+實戰ROS程式。實作中搭配艾鍗獨家研發Raspberry Pi擴充板,真正落實「做中學,學中做」,幫助每一位學習者都能自然而然且無壓力地培養與業界接軌的ROS技能。課程特別設計成兩階段,在第一階段,將教你在電腦中建置基於Linux Ubuntu的ROS系統,並能學會機器人主機(Raspberry Pi)與各部位進行通訊,讓你逐漸掌握ROS系統開發必會的指令來進行重要控制。在第二階段,講師以ROS認證機器人-Turtlebot Burger實機演示,教你進階應用包括gmapping(地圖構建開源套件)、move_base(路徑規劃套件)等ROS套件使用方法和SLAM(simultaneous localization and mapping,即時定位與地圖構建)、Navigation(導航)等ROS演算法應用,讓你能快速掌握ROS技術核心、參數調整與除錯的技巧。用ROS技術來為自身職能加分,增強開發實戰力!
課程特色
1.主流ROS機器人開發平台教學
在全球主流的機器人開發平台中進行開發,幫助您可以快速開發符合需求的機器人。
2.教材使用ROS官方認證機器人
使用ROS官方認證的機器人(turtlebot3 burger)進行教學,學員專享豐富的教學資源,學習更Easy。
3.資深機器人開發工程師親授
具有豐富開發經驗的資深工程師親自教您產業實務,快速掌握關鍵技術,縮短摸索碰壁的時間。
4.完整程式碼開發實戰
做中學,幫助你快速建構開發觀念,透過完整開發程式碼,提高學習效率,快速Get職能,縮短開發時間。
我可以學到什麼
- 能了解全球主流的機器人系統---ROS之緣起、特性與應用。
- 能學會ROS機器人系統開發環境之建置與基本指令操作。
- 能了解ROS機器人系統架構與重要觀念,包括ROS Master、節點(Node)、消息(Message)、話題(Topic)…
- 能學會在ROS系統中的程式開發與節點通訊。
- 能學會專屬ROS package(套件)之創建。
- 能學會在Raspberry Pi上建置ROS系統與應用,包括I/O控制、遠端監控。
- 能了解常用機器人之感測器-Lidar(光達)之特性與應用。
- 能學會以TF套件進行座標轉換之應用。
- 能學會Laser-based SLAM(即時定位與地圖構建)之相關套件應用Gmapping。
- 能學會以move_base、amcl等套件實現2D Navigation之應用。
- 能學會以GUI工具套件rqt、3D可視化工具套件rviz等進行開發資料之記錄、分析與模擬,作為後續開發優化之依據。
- 能從ROS機器人Turtlebot操作中,學會ROS套件的整合應用。
- 之後能精進於ROS開發相關領域,包括嵌入式系統開發、C語言、Python、MCU韌體開發、影像辨識、機器人控制、Sensor Fusion、軟體系統整合等。
適合對象
1.想學習在Linux(Ubuntu)環境下開發ROS機器人。
2.想學習ROS相關演算法開發的你
3.已開始接觸ROS相關開發,但仍對ROS技術似懂非懂的你。
4.想在最短時間內快速掌握ROS開發技術的重點的你。
5.想了解ROS參數調教技巧與涵義的你。
6.想了解ROS演算法背後的數學式與物理涵義的你。
課程架構
應用場域
